测试平台搭建
准备的资料如下:
- Intel CPU笔记本电脑 1台:双核以上,带RJ45网口,网卡芯片最好为Intel系列
- 操作系统:WINDOWS10
- 网线 1条
- 开关电源:24V/3A
- 步进电机及驱动器:深圳锐特机电的步进伺服驱动器ECT60及电机57A2EC
BIOS设置
关闭[……]
准备的资料如下:
关闭[……]

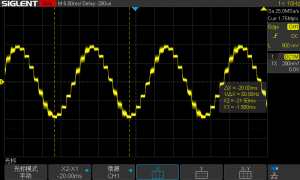
运动控制功能是codesys及EtherCAT通讯的重要功能,接下来对测试EtherCAT的运动控制部分,由于对这一部分功能不熟悉,所以测试程序采用ST语言,采用 case语句,方便测试各个函数的运行功能和状态。
EtherCAT逐渐成为工业控制的主流总线,本节采用树莓派4B硬件,安装Codesys支持库,采用EtherCAT通讯方式,控制锐特机电的总线步进驱动器ECR60,实现对步进电机的运动控制。
主要参考:http://bbs.hicodesys.com/thread-7357-1-1.html
[……]

2008年至今,从事步进电机、无刷电机、伺服电机的驱动设计开发。保持对电机驱动技术的关注和探索。