数控机床在制造业具有重要作用,当前数控机床的数控系统驱动元件主要包含开环步进电机,直流伺服电机,交流伺服电机。控制系统的工作方式主要有开环,半闭环和全闭环。
深圳锐特机电技术有限公司提供的步进光栅闭环方案,在开环步进电机基础上,将位置检测单元直接安装在工作台上,将工作台的位移信息反馈至[……]

数控机床在制造业具有重要作用,当前数控机床的数控系统驱动元件主要包含开环步进电机,直流伺服电机,交流伺服电机。控制系统的工作方式主要有开环,半闭环和全闭环。
深圳锐特机电技术有限公司提供的步进光栅闭环方案,在开环步进电机基础上,将位置检测单元直接安装在工作台上,将工作台的位移信息反馈至[……]

五相步进电机及驱动,代表步进电机发展方向的最高水准。高端装备上的五相步进电机及驱动器,目前为国外厂商绝对主导,主要解决方案为东方马达(Oriental motor)、三洋电气等日系品牌。五相步进电机及驱动器由于电机工艺的复杂性及驱动器开发的难度较大,国内厂商主要精力还在较常见的两相、三相步进电机及驱[……]
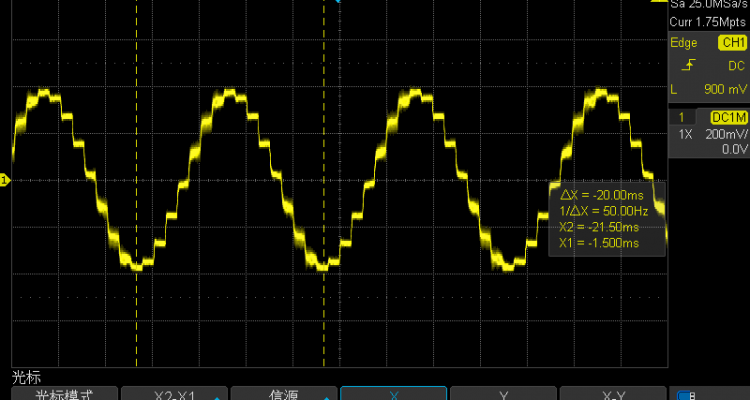
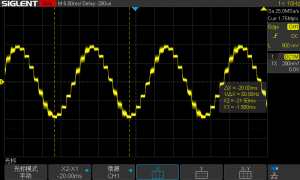
细分技术基础上,引入指令平滑,降低了各速度段的振动,针对两相步进电机的共振点,引入谐波技术,极大的降低了步进电机的共振,使得步进电机的运行噪声水平极大的降低。[……]
准备的资料如下:
关闭[……]

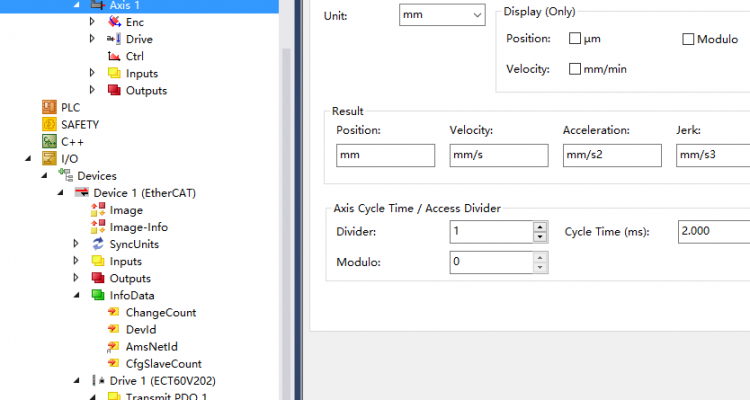
运动控制功能是codesys及EtherCAT通讯的重要功能,接下来对测试EtherCAT的运动控制部分,由于对这一部分功能不熟悉,所以测试程序采用ST语言,采用 case语句,方便测试各个函数的运行功能和状态。

2008年至今,从事步进电机、无刷电机、伺服电机的驱动设计开发。保持对电机驱动技术的关注和探索。